Shuttle2X

Official start with project kick-off at Bosch Research in Renningen.

Requirements for the overall system (infrastructure, communication), routes, and scenarios

Developer approval for vehicle operation, system and safety concept, driving function concept, initial implementation of infrastructure and shuttle components.

Specification of perception algorithms and communication stacks, development of safeguarding methods and mechanisms, establishment of essential legal requirements.

System integration and prototype implementation, concept for data protection, liability law and product compliance, as well as IT security.

The final system and safety concept for the infrastructure and shuttle is validated. Prototype demonstration of the driving function in conjunction with the infrastructure has been completed.

Evaluation has been conducted, and project results have been presented to standardization committees, at trade fairs and conferences.
Small-town environment with various bottlenecks, traffic light systems, and routes with different speed ranges and traffic loads.
Urban low-speed areas with blind spots and streets with higher urban speeds for connecting adjacent neighborhoods.
Public roads in an industrial area with many trucks and special vehicles, crossing roundabouts and priority roads.
April 2025
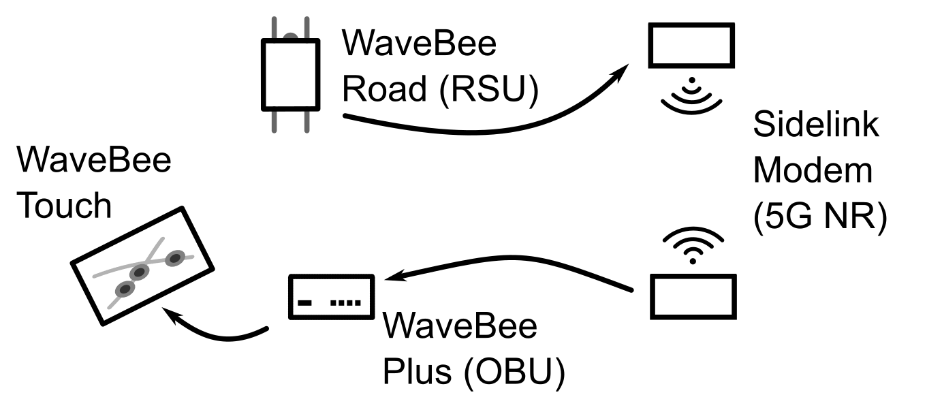
As part of the efforts within the Shuttle2X project, development of a software-defined radio (SDR) implementation of the 5G NR Sidelink has been in focus at the Fraunhofer institute. The implementation is based on the open-source 5G NR software stack implementation from OpenAirInterface and complies with the 3GPP-Rel. 16 Sidelink.
April 3, 2025
Following an invitation from the Federal Ministry of Education and Research (BMBF), the Federal Ministry for Economic Affairs and Climate Action (BMWK) and the Federal Ministry for Digital and Transport (BMDV), the Shuttle2X project was presented at the symposium “Research and Technology for Autonomous Driving” held on November 27-28 in Berlin.

March 5, 2025
Project partners Bosch and Keysight participated in the 5GAA Tech Showcase Event, taking place on October 24, 2024, in Berlin, where they demonstrated technologies which have been used and improved as part of the Shuttle2X project.

August 6, 2024
Modern transportation systems are increasingly equipped with different types of sensors in order to perceive their environment by detecting unoccupied regions, presence of road users and other safety-relevant objects. [...]
May 29, 2024
We are happy to announce that Shuttle2X project partners will be presenting four exciting technical papers at the upcoming IEEE Intelligent Vehicles Symposium (IV 2024). This event is an excellent platform for showcasing the latest advancements in intelligent vehicle technologies, and we are proud to be a part of it.

April 9, 2024
We are happy to announce that Shuttle2X successfully contributed to one of the main V2X standardisation documents: Basic Set of Applications (BSA) (TR 102 638) developed by ETSI’s Technical Committee on Intelligent Transportation Systems.

April 9, 2024
On April 8-9, the Shuttle2X consortium convened for a meeting hosted at the Fraunhofer Heinrich Hertz Institute (HHI) in Berlin. Organized by Fraunhofer HHI, in collaboration with our other Berlin-based partner, reuschlaw, the gathering welcomed representatives from all active project partners, totaling 20 colleagues.










